隐马尔可夫模型及分词上的实现
条评论前言
最近开始看自然语言处理的实战部分,看到了统计分词那里,统计分词用的模型是隐马尔可夫模型(HMM),这里先介绍一下这个模型,它是可用于标注问题的统计学模型,描述由隐藏的马尔可夫链随机生成观测序列的过程,属于生成模型。
隐马尔可夫模型的基本概念
隐马尔可夫模型的定义
定义10.1(隐马尔可夫模型)
隐马尔可夫模型是关于时序的概率模型,描述由一个隐藏的马尔科夫链随机生成不可观测的状态随机序列,再由各个状态生成一个观测而产生观测随机序列的过程。隐藏的马尔可夫链随机生成的状态的序列,称为状态序列;每个状态生成一个观测,而由此产生的观测的随机序列,称为观测序列。序列的每一个位置又可以看作是一个时刻。
隐马尔可夫模型由初始概率分布、状态转移概率分布以及观测概率分布确定。隐马尔可夫模型的形式定义如下:
设$Q$是所有可能的状态的集合,$V$是所有可能的观测的集合。$$Q=\{q_1,q_2,…,q_N\},V=\{v_1,v_2,…,v_M\}$$其中,$N$是可能的状态数,$M$是可能的观测数.以下$I$是长度为$T$的状态序列,$O$是对应的观测序列。$$I=(i_1,i_2,…,i_T),O=(o_1,o_2,…,o_T)$$$A$是状态转移概率矩阵.$$A=[a_{ij}]_{N\times N}\tag{10.1}$$
其中,$$a_{ij}=P(i_{t+1}=q_j|i_t=q_i),i=1,2,…,N;j=1,2,…,N\tag{10.2}$$是在时刻t处于$q_i$的条件下在时刻$t+1$转移到状态$q_j$的概率。
$B$是观测概率矩阵:$$B=[b_j(k)]_{N\times M}\tag{10.3}$$其中,$$b_j(k)=P(o_t=v_k|i_t=q_j),k=1,2,…,M;j=1,2,…,N\tag{10.4}$$是在时刻$t$处于状态$q_j$的条件下生成观测$v_k$的概率。
$\pi$是初始状态概率向量:$$\pi=(\pi_i)\tag{10.5}$$其中,$$\pi_i=P(i_1=q_i),i=1,2,…,N\tag{10.6}$$是时刻$t=1$处于状态$q_i$的概率。
隐马尔可夫模型由初始状态概率向量$\pi$、状态转移概率矩阵$A$和观测概率矩阵$B$决定。$\pi$和$A$决定状态序列,$B$决定观测序列。因此,隐马尔可夫模型$\lambda$可以用三元符号表示,即$$\lambda=(A,B,\pi)\tag{10.7}$$
$A,B,\pi$称为隐马尔可夫模型的三要素。
状态转移概率矩阵$A$与初始状态概率向量$\pi$确定了隐藏的马尔可夫链,生成不可观测的状态序列。观测概率矩阵$B$确定了如何从状态生成观测,与状态序列综合确定了如何产生观测序列。
从定义上可知,隐马尔可夫模型作了两个基本假设:
- 齐次马尔可夫性假设,即假设隐藏的马尔可夫链在任意时刻$t$的状态只依赖于其前一时刻的状态,与其他时刻的状态及观测无关,也与时刻$t$无关。$$P(i_t|i_{t-1},o_{t-1},…,i_1,o_1)=P(i_t|i_{t-1}),t=1,2,…,T\tag{10.8}$$
- 观测独立性假设,即假设任意时刻的观测只依赖于该时刻的马尔可夫链的状态,与其他观测及状态无关。$$P(o_t|i_T,o_T,i_{T-1},o_{T-1},…,i_{t+1},o_{t+1},i_t,i_{t-1},o_{t-1},…,i_1,o_1)=P(o_t|i_t)\tag{10.9}$$
隐马尔可夫模型可以用于标注,这时状态对应着标记。标注问题是给定观测的序列预测其对应的标记序列。可以假设标注问题的数据是由隐马尔可夫模型生成的。这样我们可以利用隐马尔可夫模型的学习与预测算法进行标注。
观测序列的生成过程
根据隐马尔可夫模型定义,可以将一个长度为$T$的观测序列$O=(O_1,O_2,…,O_T)$的生成过程描述如下:
算法10.1(观测序列的生成)
输入:隐马尔可夫模型$\lambda=(A,B,\pi)$,观测序列长度为$T$;
输出:观测序列$O=(o_1,o_2,…,o_T)$
(1)按照初始状态分布$\pi$产生状态$i_1$
(2)令$t=1$
(3)按照状态$i_t$的观测概率分布$b_{i_t}(k)$生成$o_t$
(4)按照状态$i_t$的状态转移概率分布$\{a_{i_ti_{t+1}}\}$产生状态$i_t+1,i_t+1=1,2,…,N$
(5)令$t=t+1$;如果$t<T$,转步(3);否则,终止。
隐马尔可夫模型的3个基本问题
隐马尔可夫模型有三个基本问题:
- 概率计算问题。给定模型$\lambda=(A,B,\pi)$和观测序列$O=(o_1,o_2,…,o_T)$,计算在模型$\lambda$下观测序列$O$出现的概率$P(O|\lambda)$.
- 学习问题。已知观测序列$O=(o_1,o_2,…,o_T)$,估计模型$\lambda=(A,B,\pi)$参数,使得在该模型下观测序列概率$P(O|\lambda)$最大。即用极大似然估计的方法估计参数。
- 预测问题。已知模型$\lambda=(A,B,\pi)$和观测序列$O=(o_1,o_2,…,o_T)$,求对给定观测序列条件概率$P(I|O)$最大的状态序列$I=(i_1,i_2,…,i_T)$。即给定观测序列,求最有可能的对应的状态序列。
概率计算方法
在这一节中,介绍一下计算观测序列概率$P(O|\lambda)$的前向(forward)和后向(backward)算法。先介绍概念上可行但计算上不可行的直接计算法。
直接计算法
给定模型$\lambda=(A,B,\pi)$和观测序列$O=(o_1,o_2,…,o_T)$,计算观测序列$O$出现的概率$P(O|\lambda)$。最直接的方法是按概率公式直接计算。通过列举所有可能的长度为$T$的状态序列$I=(i_1,i_2,…,i_T)$,求各个状态序列I与观测序列$O=(o_1,o_2,…,o_T)$的联合概率$P(O,I|\lambda)$,然后对所有可能的状态序列求和,得到$P(O|\lambda)$.
状态序列$I=(i_1,i_2,…,i_T)$的概率是$$P(I|\lambda)=\pi_{i_1}a_{i_1i_2}a_{i_2i_3}…a_{i_{T-1}i_T}\tag{10.10}$$
对固定的状态序列I=(i_1,i_2,…,i_T),观测序列$O=(o_1,o_2,…,o_T)$的概率是$P(O|I,\lambda)=b_{i_1}(o_1)b_{i_2}(o_2)…b_{i_T}(o_T)\tag{10.11}$
$O$和$I$同时出现的联合概率为$$P(O|I,\lambda)=P(I|\lambda)=\pi_{i_1}b_{i_1}(o_1)a_{i_1i_2}b_{i_2}(o_2)…a_{i_{T-1}i_T}b_{i_T}(O_T)\tag{10.12}$$
然后,对所有可能的状态序列$I$求和,得到观测序列$O$的概率$P(O|\lambda)$,即$$
\begin{split}
P(O|\lambda)&=\sum_IP(O|I,\lambda)P(I|\lambda)\\
&=\sum_{i_1,i_2,…,i_T}{\pi_{i_1}b_{i_1}(o_1)a_{i_1i_2}b_{i_2}(o_2)…a_{i_{T-1}i_T}b_{i_T}(O_T)}
\end{split}\tag{10.13}
$$
但是,利用公式(10.13)计算量很大,是$O(TN^T)$阶的,这种算法不可行。
前向算法
首先定义前向概率
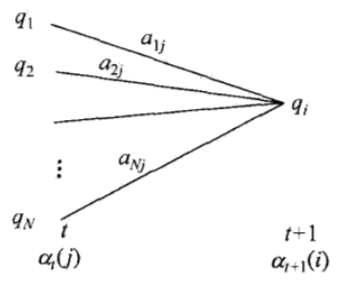
定义10.2(前向概率) 给定隐马尔可夫模型$\lambda$,定义到时刻$t$部分观测序列为$o_1,o_2,…,o_t$且状态为$q_i$的概率为前向概率,记作$$\alpha _t(i)=P(o_1,o_2,…,o_t,i_t=q_i|\lambda)\tag{10.14}$$
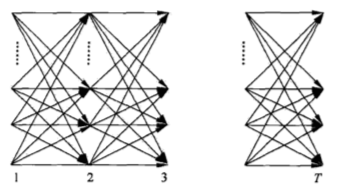
可以递推地求得前向概率$\alpha_t(i)$及观测序列概率$P(O|\lambda)$。
算法10.2(观测序列概率的前向算法)
输入:隐马尔可夫模型$\lambda$,观测序列$O$;
输出:观测序列概率$P(O|\lambda)$.
- 初值$$\alpha_1(i)=\pi_ib_i(o_1),i=1,2,…,N\tag{10.15}$$
- 递推 对$t=1,2,…,T-1$.$$\alpha_{t+1}(i)=[\sum_{j=1}^{N}\alpha_t(j)a_{ji}]b_i(o_t+1),i=1,2,…,N\tag{10.16}$$
- 终止$$P(O|\lambda)=\sum_{i=1}^{N}\alpha_T(i)\tag{10.17}$$
未完待续
HMM在统计分词中的实现
1 | class HMM(object): |

- 本文链接:https://netycc.com/2018/10/28/隐马尔可夫模型及分词上的实现/
- 版权声明:本博客所有文章除特别声明外,均采用 CC BY-NC-SA 3.0 CN 许可协议。转载请注明出处!
分享